 A L I D A
A L I D A
1 문제
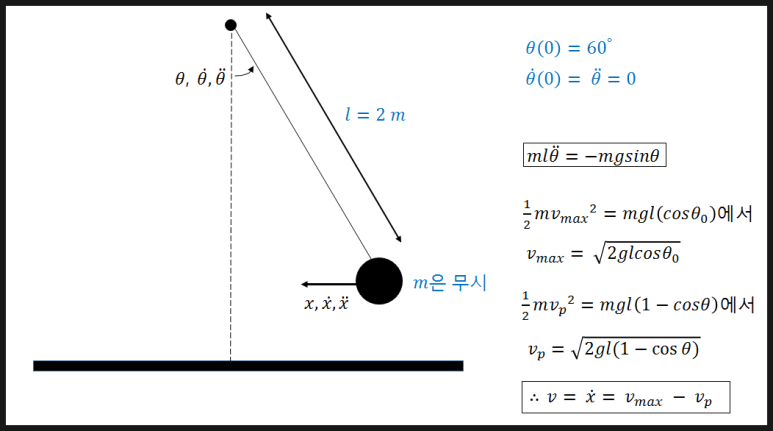
위의 조건을 바탕으로 단진자의 운동을 애니메이션화하는 코드를 작성하시오. 이 때, 단진자의 x방향 운동속도를 화살표로 나타내시오.
2 코드
from vpython import * # 7.6.2
from math import *
#------------------------------------------------------------------
# 그래픽 그려주는 코드
#------------------------------------------------------------------
# 그래픽창을 설정하는 코드
scene.center = vector(0,-1,0)
scene.width = 400
scene.height = 700
# 단진자와 이를 받쳐주는 바닥과 봉, 단진자의 실을 생성합니다
ball = sphere(pos=vector(0,0,0), radius=0.15, color=color.blue, opacity=0.8)
base = box(pos=vector(0,-2.5,-1), size=vector(2,0.1,2))
wall = box(pos=vector(0,-1,-1), size=vector(0.1,3,0.1))
bar = cylinder(pos=vector(0,0,-1), radius=0.05, axis=vector(0,0,1), color=color.yellow)
line = curve(pos=bar.pos, color=color.gray(0.5))
line.append(ball.pos)
# 속도를 가시화하기 위한 화살표객체를 생성합니다
velArrow = arrow(pos=ball.pos, axis=vector(0,0,0) , color=color.yellow)
velFlag = 1
pi = 3.14159 # pi 값
r = 2. # 실의 길이 m
theta0 = 60 # 초기각도 (deg)
theta = (180 - theta0)*pi / 180 # 초기각도 (rad)
g = 9.81 # 중력가속도
omega = 0 # 각속도
alpha = 0 # 각가속도
a = 0 # 가속도
v = 0 # 속도
v_max = sqrt(2*g*r*(-cos(theta))) # 초기각도에서의 속도의 최대값을 운동에너지 = 위치에너지로 구합니다
#------------------------------------------------------------------
# 애니메이션 코드
#------------------------------------------------------------------
t = 0
dt = 0.01
deg_theta = 0
# 텍스트를 위한 라벨 객체를 생성합니다
label1 = label()
label2 = label()
label3 = label()
while True:
rate(100)
t += dt
# 운동방정식으로 각가속도를 계산하고 이를 적분해 각속도,각도를 얻습니다
alpha = (g*sin(theta))/r
omega += alpha*dt
theta += omega*dt
# 각도를 deg단위로 변환합니다
deg_theta = 180 - theta*180./pi
# x축 방향의 속도를 계산합니다
# 실제속도 = 속도의 최대값 - 현재각도에서 속도값(위치에너지에 따른)
# pi - theta인 이유는 0도가 y축의 양의 방향이고 이 방향이 수직 윗방향이기 때문에 pi를 빼준겁니다. (자세한건 직접해보세요~)
v = v_max - sqrt(2*g*r*(1-cos(pi - theta)))
# 줄의 위치와 공의 위치를 업데이트합니다
line.modify(0, bar.pos + vector(0,0,1))
line.modify(1, ball.pos)
ball.pos = vector(r*sin(theta), r*cos(theta), 0)
# 속도화살표를 업데이트합니다. 각도에 따라 방향이 바뀌어야되므로 조건문을 추가합니다. 또한 속도값이 너무 크므로 0.3배로 화살표를 작게만들어줍니다
velArrow.pos = ball.pos
if velFlag == 0:
velArrow.axis = vector(v*0.3,0,0)
else:
velArrow.axis = vector(-v*0.3,0,0)
# 속도화살표의 방향을 바꾸기 위한 조건문
if deg_theta >= theta0 - 0.01:
velFlag = 1
elif deg_theta <= -theta0 + 0.01:
velFlag = 0
# 텍스트 데이터
label1.pos = base.pos + vector(0,-0.5,0)
label1.text = 'theta : %.2f deg' % (deg_theta)
label2.pos = base.pos + vector(0,-0.1,0)
label2.text = 'time : %.2f s' % (t)
label3.pos = base.pos + vector(0,-0.9,0)
label3.text = 'vel_x : %.2f m/s' % (v)'Coding' 카테고리의 다른 글
| VPython 예제8 - 2자유도 스프링-질량계 애니메이션 (0) | 2022.01.11 |
|---|---|
| VPython 예제7 - 공의 자유낙하 애니메이션 (free-fall) (2) (0) | 2022.01.11 |
| VPython 예제5 - 3자유도 스프링-질량계 애니메이션 (0) | 2022.01.11 |
| VPython 예제4 - 진자의 등속원운동 애니메이션 (0) | 2022.01.11 |
| VPython 예제3 - 1자유도 스프링-질량계 애니메이션(2) (0) | 2022.01.11 |





