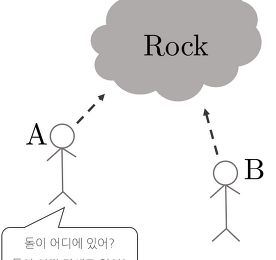
로봇공학 썸네일형 리스트형 강체 변환 (Rigid Body Transformation) 개념 정리 내용을 보강하여 3D Rigid Body Transformation 개념 정리 포스트에 업로드하였습니다. 1 Introduction 본 포스트는 강체 변환 (Rigid Body Transformation)에 대해 다룬다. 강체(Rigid Body)란 이론적으로 무한대의 강성을 가지는 물체를 말한다. 따라서 강체에 힘을 가해도 변형이 되지 않으며 무게중심으로 지정되는 하나의 점에 의해 운동이 결정되는 특징이 있다. 필자가 공부하고 있는 Simultaneous Localization and Mapping (SLAM)에서 움직이는 로봇은 형태가 일정하다고 가정하므로 결국 강체 변환 (Rigid Body Transformation)을 사용하여 수학적으로 표현한다. 해당 포스트는 강체 변환에 대해 공부 목적으로 .. 더보기 회전 행렬 (Rotation Matrix) 개념 정리 내용을 보강하여 3D Rigid Body Transformation 개념 정리 포스트에 업로드하였습니다. Introduction 회전행렬은 n차원 공간 상 존재하는 물체를 회전시킬 때 사용하는 행렬이다. 일반적으로 2차원 또는 3차원 공간 상의 강체(rigid body)를 회전시킬 때 사용한다. 본 포스트에서는 3차원 공간 상의 강체를 회전시킨다고 가정한다. 다음과 같이 공간 상의 고정좌표계 $\{S\}$와 강체의 무게중심점에 존재하는 이동좌표계 $\{B\}$가 존재한다고 가정하자. $\{B\}$ 의 원점을 $P$, 축을 $(\hat{x},\hat{y},\hat{z})$ 하고 space frame $\{S\}$ 의 축을 $(\hat{X},\hat{Y},\hat{Z})$ 라고 하자. 이 때 space fr.. 더보기 좌표계 (Coordinate System) 개념 정리 내용을 보강하여 3D Rigid Body Transformation 개념 정리 포스트에 업로드하였습니다. 1 Introduction 해당 포스트는 로봇공학에서 좌표계에 대한 공부 목적으로 작성한 포스트이며 이미 잘 정리된 여러 블로그 포스트들의 내용을 참고하여 작성하였다. 2 Coordinate System 두 사람이 하나의 돌을 바라보고 있을 때 돌을 표현하는 방법이 서로 다를 수 있다. A가 B에게 "돌이 어디에 어떤 자세로 있어?" 라고 물었을 때 B는 어떻게 대답해야 할까? 정답은 알 수 없다. 엄밀하게 말하면 질문에 오류가 있다. 어디를 기준으로 돌이 어디에 있는가? 돌의 표면 중 정확히 어느 점을 물어보고 있는가? 이처럼 물체의 위치와 자세를 이야기할 때 어디를 기준으로 표현하는가? (기준좌표.. 더보기 이전 1 다음
 A L I D A
A L I D A